

In general, touch characteristics are what we have the least control over. We can’t very well tell users to change the size of their fingers and generally we don’t control how much pressure they use. Still, we can take their behavior into consideration and we can design sensors to suit the way we expect the users to engage with them.
Pressure
Does it make any difference how hard a user presses the sensor? What are the effects of changing pressure? To answer these questions, we sampled both gentle (the smallest signal we could consistently produce) and strong (taking advantage of the full dynamic range of the sensor) touches.
Precision / Accuracy
We found that on average that low pressure performed better than high pressure over all sensors for accuracy. However, the low pressure condition also had low precision. Strong pressure typically was less accurate, but more precise.
As in: on average low pressure performed better than high pressure, but the readings of the high pressure condition have less variability.

Consistency (as a function of method)
The difference between high and low pressure was especially strong for the CUBIC peak-detection method. The difference between sensor behavior for high and low pressure was lowest with GAUSSIAN, followed closely by LINEAR, mTOUCH, and COM.
As in: You should probably not use CUBIC peak-detection, while GAUSSIAN might be a good choice if you care mostly about precision and repeatability of measures.
Touch Size
Should electrodes be spaced at intervals smaller than the touch size? Should electrode spacing and touch size be the same? Or maybe touch size should be smaller than electrode size? In practice, the touch size cannot easily change (the size of a fingertip will not change much for a given user). However, we might estimate the expected touch size and then design the sensor accordingly. To investigate how touch/digit width ratios influence the sensing, we used touch-points 50%, 100% and 150% the size of the electrodes (which is the same as the electrode spacing).
In general, we found, large touches perform better than smaller touches. However, this patter was not true for all sensors. For example, for the non-interdigitated sensor, small touches performed better than large touches.
Information Content in Signal
To understand why this is the case, we analyzed how much the signal changes when the position changes. The reasoning for this is that, if there is a measurable change between two positions, there should be a way to determine if the touch is at position 1 or 2. If there is no change between two positions, even the smartest algorithm cannot identify where the sensor is being touched.
The plot below shows the normalized magnitude of the change in signal between adjacent positions. X axis is the position, Y axis magnitude of change. Colors indicate different electrodes. Top row is smallest touch, bottom row is largest touch.

What we found is that, for the small touch size the changes in signal were evenly distributed. However, as the touch size increased, there are areas (between 20mm and 50mm as well as between 70mm and 100mm) where there is almost no change in signal and, consequently, it is reasonable that the estimation of touch position is error-prone in those regions.
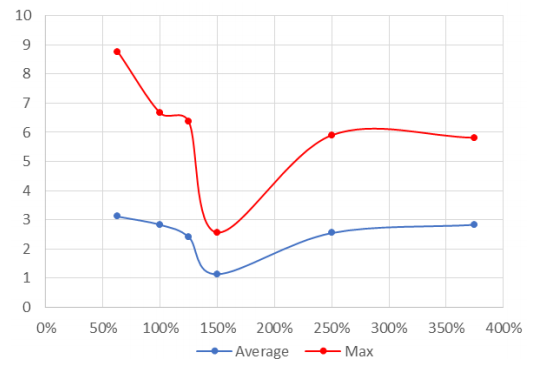
While our initial interest was establishing if touch size should be equal to, smaller, or larger than the electrode size, this suggests that the problem is more complex and that there is a periodic interaction between the size of the elctrode and of the touch. In retrospect it would have been valuable to have a wider range of touch sizes, as we did in our previous (more limited) study on touch accuracy of pressure sensor matrices. That work suggests that further increasing touch-sizes need not result in better accuracy of the tracked position:
- Information
- Interaction with Algorithms